Button Actuation for Wheelchair User
December 11, 2013Cost: $101 to $300
Time Needed: Weekend
Skill Level: Intermediate
Functional Abilities/Limitations: Difficulty in Handling and Fingering, Difficulty Reaching with Arms, Loss of Upper Extremity Skills
About
People with Multiple Sclerosis (MS) experience loss of mobility to varying degrees. Performing activities that require reaching out is difficult for people with limited mobility in one or both arms, and motivates the need for an AT that can aid in such tasks. We specifically targeted the problem of pushing crosswalk buttons on the front or right side by a person without mobility in the right arm who uses a powered wheelchair and requires significant maneuvering to actuate buttons. The ultimate aim of this project is to increase our client’s independence and reduce maneuvering by developing an AT that can be used to reliably actuate crosswalk buttons. Inconsistency in the type, location and height of crosswalk buttons warrants an AT with multiple degrees of freedom. The final prototype device is a hybrid mechanical-mechatronic arm which allows for a user to push a variety of buttons. Aiming the arm is accomplished manually by the user, and a mechatronic pusher mounted to the end of the arm provides the force to actuate a button.Relevant Links
Step 1: Wheelchair Mounting Bracket
Each powered wheelchair is highly customized, so mounting brackets will likely be case specific. In general, try to re-use as much standard mounting hardware as possible. For our project, a mounting bracket for a standard joystick was adapted to hold the arm by attaching an aluminum plate. We also made an effort to allow our client’s water bottle holder to remain in its usual position, requiring our arm to rotate around the water bottle.

Step 2: Arm Deployment Mechanism
To ensure the usability of an arm-type mechanism, thought needs to be given to how a client will travel with the device mounted to the chair. For our arm, there is a stowed position and an operational position. In the stowed position, care was paid to minimizing the width added to the chair, and when deployed priority was given to placing the arm handle in a comfortable position for use. In order to easily deploy the arm, we designed a support plate that would rotate out at the press of a button. It was mounted to the end of the bracket plate via bushings, bearings, a shaft, and shaft collars. A gear was attached to the shaft which meshed with a gear attached to a servo mounted on the bracket plate. The support plate rotated outwards as the servo turned the gear mounted to the shaft.

Step 3: Build Arm and Pivot
For our project, the primary arm was a 1 inch OD fiberglass tube of approximately 20 inch in length. To allow for manual aiming by our client, a plastic tubing handle was epoxied through the main arm tube to allow for a secure place to grip. Our arm allowed for two degrees of freedom: rotation about both the vertical and horizontal axes. These rotations allowed our client to adjust the horizontal position of the arm through approximately 150 degrees, and vertically through approximately 30 degrees, or 6 inches. Rotations were accomplished by mounting the arm to a custom bracket built using 1/4 inch aluminum plate cut on a waterjet and assembled using the T-nut technique.

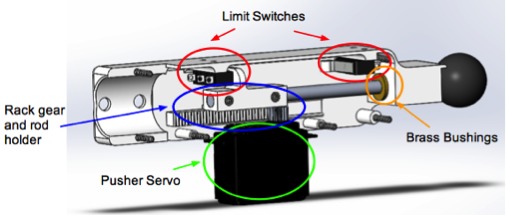
Step 4: Pusher Assembly
Button actuation requires a pushing force from the end of the arm. Our client lacked the arm and hand strength to accomplish this task mechanically, so a mechatronic solution was used. Our pusher assembly was 3D printed to reduce machining time and incorporate necessary features to mount a servo and limit switches. Actuation was accomplished using a servo and a rack gear, and twin limit switches provided feedback. A commercial linear actuator would also work fine. In addition, we mounted springs on the opposite end of the arm in order to reduce the force needed to lift it.
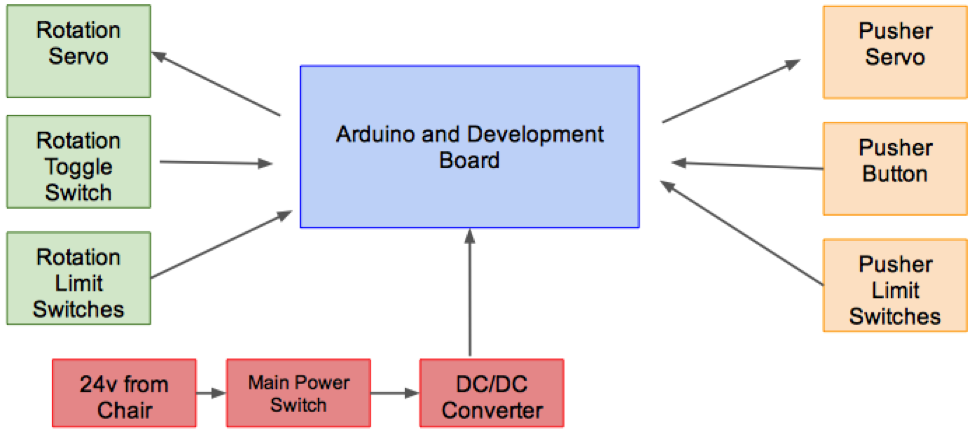
Step 5: Incorporate Electronics
As the final step, the servos were connected to an Arduino nano programmed to control the arm. Three buttons were added: a master toggle switch, a toggle switch to deploy the arm, and a pushbutton mounted to the end of the handle to actuate the end effector. Limit switches were added to the deployment plate as safety measures. The entire system was powered off of the 24 volt wheelchair batteries and was stepped down to 12 volts using a DC to DC converter.
Aids for Daily Living, Transportation, Wheeled Mobility, Workplace
Tags:
ButtonsCrosswalkMITPower ChairRobot
Tools Required
- Band Saw
- Drill Press
- Soldering Iron and Heat Gun
- Various Hand Tools
- Drill Bits and Taps
- 3D Printer (optional but helpful)
- Waterjet (optional but helpful)
Materials Required
- 1/4 inch aluminum plate stock
- ~24 in of 1 in OD fiberglass tubing
- 4-40, 6-32, and 1/4-20 screws, bolts, and washers
- 2 Servos (we used HiTech)
- Arduino Uno
- 1/2 in diameter aluminum shaft stock
- 1/4 in diameter aluminum shaft stock
- 32 Pitch Aluminum Gear: 16 teeth (servo city)
- 32 Pitch Aluminum Gear: 76 teeth (servo city)
- 48 Pitch metal gear: 15 teeth (servo city)
- Shaft collar (servo city)
- 24v-12v DC/DC converter
- Stainless Steel shoulder screws- 1/4" shoulder diameter
- Flanged sleeve bearings
- Epoxy and Paint
Safety Precautions
Be sure to wear appropriate safety gear during the use of machinery and paint/epoxy.